|
I am a first-year Ph.D. student in Mechanical Engineering at the RPM Robotics lab, Seoul National University, advised by Prof. Ayoung Kim. My research interests include LiDAR-based Simultaneous Localization and Mapping (SLAM), Lifelong Mapping, and Global Localization, with a focus on developing robust and efficient algorithms for autonomous navigation and mapping in dynamic environments. I am particularly interested in leveraging multi-session sensor data with temporal variations for reliable autonomy. Email / Google Scholar / Github / LinkedIn |

|
|
|
|
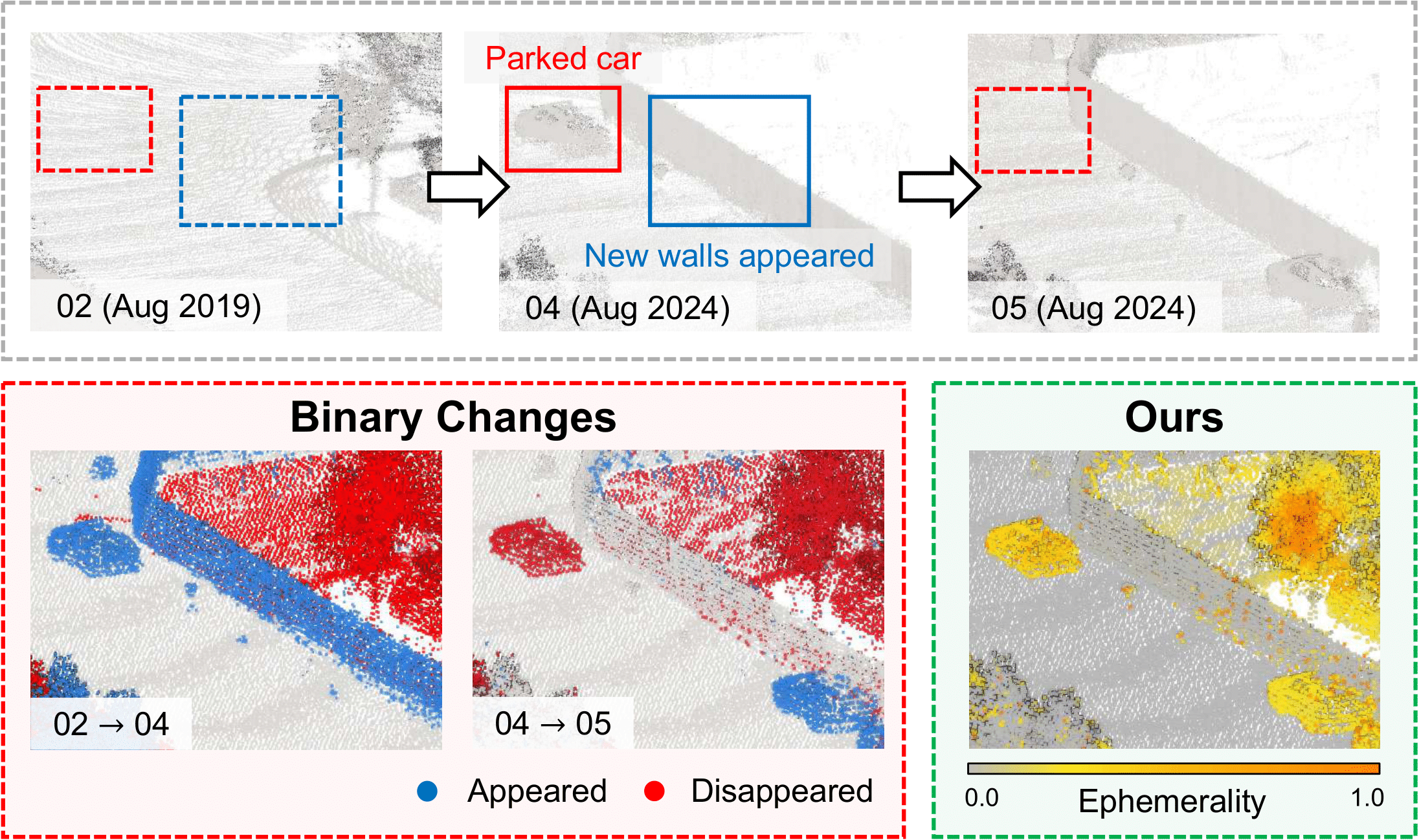
Ephemerality meets LiDAR-based Lifelong Mapping
Hyeonjae Gil*, Dongjae Lee*, Giseop Kim, Ayoung Kim IEEE International Conference on Robotics and Automation (ICRA), 2025 [arXiv] [code] ELite is a LiDAR-based lifelong mapping framework that leverages two-stage ephemerality to accurately align multiple sessions, remove dynamic objects, and update maps while robustly distinguishing between transient and persistent environmental changes. |
|
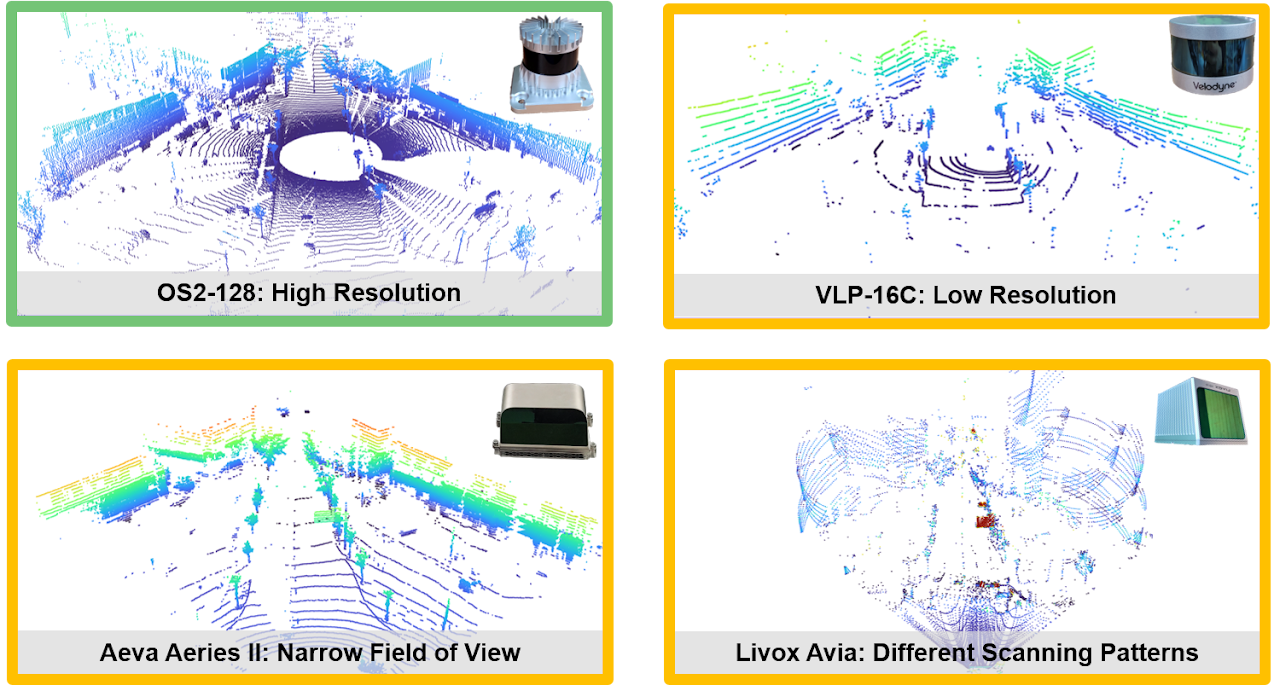
HeLiPR: Heterogeneous LiDAR dataset for inter-LiDAR place recognition under spatiotemporal variations
Minwoo Jung, Wooseong Yang, Dongjae Lee, Hyeonjae Gil, Ayoung Kim The International Journal of Robotics Research, 2024 [paper] [arXiv] [project page] HeLiPR is the first heterogeneous LiDAR dataset designed for place recognition across varying LiDAR types, supporting inter-LiDAR place recognition in diverse environments. |
|
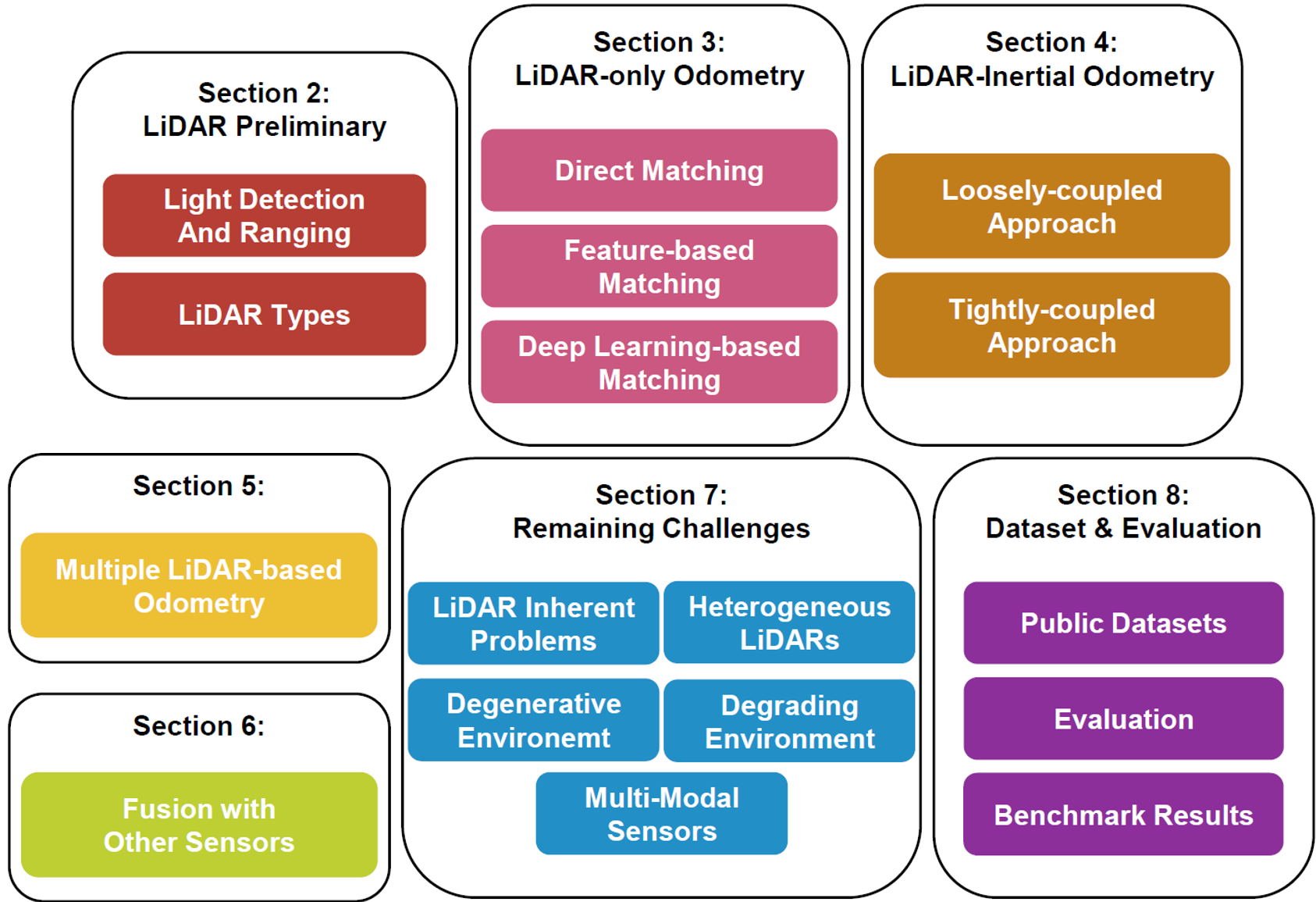
LiDAR odometry survey: recent advancements and remaining challenges
Dongjae Lee, Minwoo Jung, Wooseong Yang, Ayoung Kim Intelligent Service Robotics, 2024 [paper] A survey paper on LiDAR odometry, including a comprehensive review of recent advancements and remaining challenges. |
|
|
|
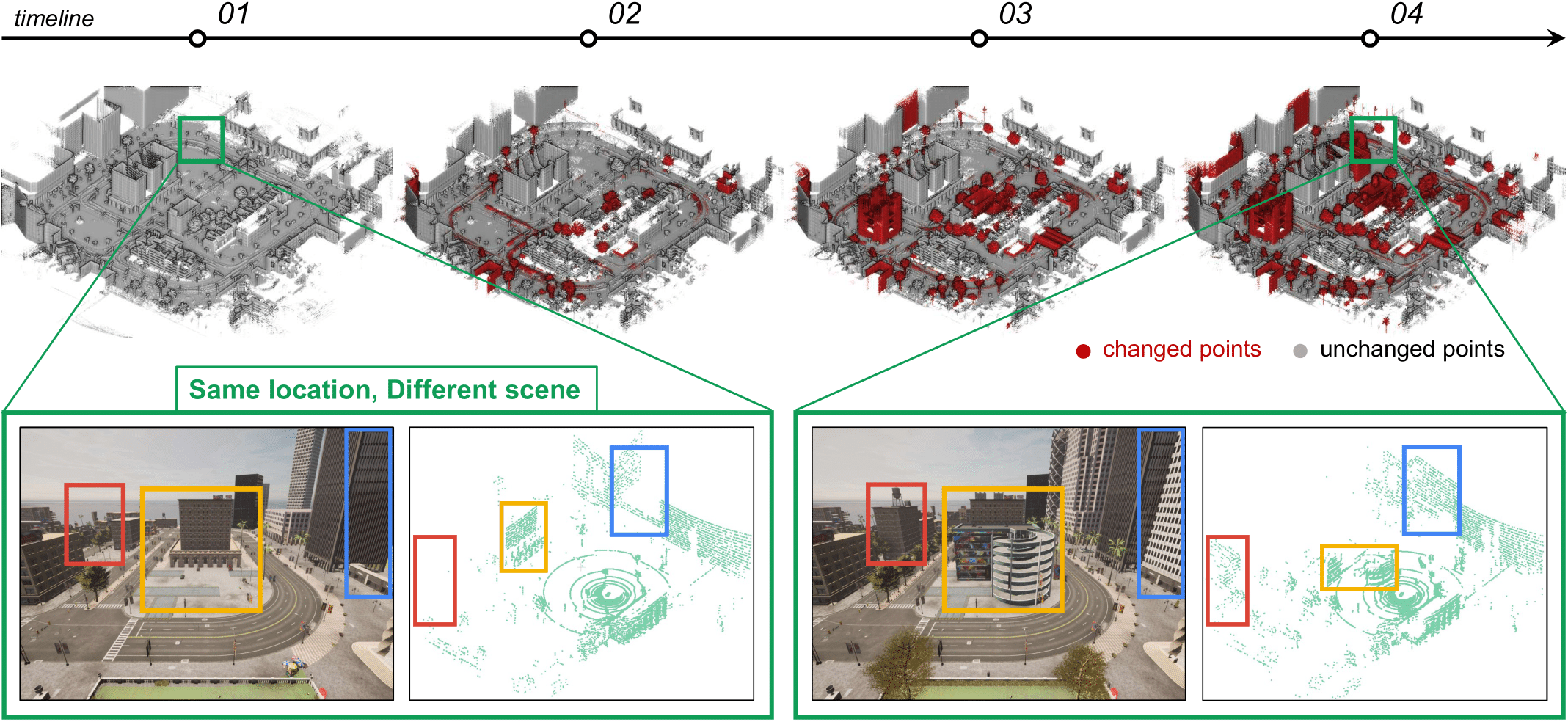
The City that Never Settles: Simulation-based LiDAR Dataset for Long-Term Place Recognition Under Extreme Structural Changes
Hyunho Song, Dongjae Lee, Seunghun Oh, Minwoo Jung, Ayoung Kim 4th Workshop on Future of Construction, ICRA, 2025 (Best research award) [arXiv] [project page] A simulation-based dataset created using CARLA simulator, capturing major structural changes, for long-term place recognition in dynamic environments. |
|
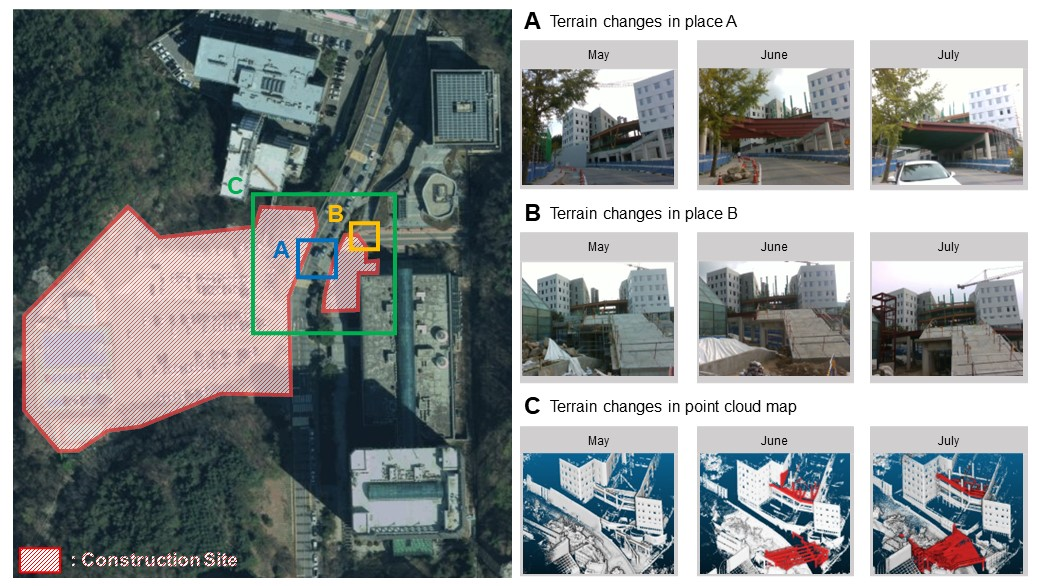
ConPR: Ongoing Construction Site Dataset for Place Recognition
Dongjae Lee, Minwoo Jung, Ayoung Kim Workshop on Closing the Loop on Localization, IROS, 2023 (Best overall presentation award) [arXiv] [project page] Ongoing construction site dataset, supporting the development of robust place recognition algorithms in dynamic, changing environments. |
|
Tightly-coupled gnss-lidar-inertial state estimator for mapping and autonomous driving
Hyeonjae Gil, Dongjae Lee, Gwanhyeong Song, Seunguk Ahn, Ayoung Kim The Journal of Korea Robotics Society, 2023 (Best paper award) [paper] Tightly-coupled GNSS-LiDAR-Inertial state estimator for SLAM and autonomous driving, addressing long-term drift through the integration of raw GNSS measurements, which ensures smooth and accurate state estimation. |
|
|